東海大学の学生はマイクロソフトOfficeが無償で利用できるようになりました。
以上のリンクにアクセスする事でダウンロードできます。
Office環境の整っていない方は、是非利用して下さい。

ソフトもハードもわかる技術者を目指そう
東海大学の学生はマイクロソフトOfficeが無償で利用できるようになりました。
以上のリンクにアクセスする事でダウンロードできます。
Office環境の整っていない方は、是非利用して下さい。
2015年4月6日(月)に春学期,在学生学科ガイダンスが実施されます.
コンピュータ応用工学科は,「16-204」教室で実施することになりました.
時間は,例年通り以下の通りとなっております.
9:20~ 4年次生以上 (2B生・2L生他)
11:05~ 3年次生 (3B生・3L生)
13:25~ 2年次生 (4B生・4L生)
また,教室等についてですが,変更となる場合もありますので,
各自,掲示板等での確認もお願いします.
当学科では,2月13日に湘南キャンパス16号館で「2014年度卒業研究論文発表会」を行いました.詳しくはこちらをご覧ください.
2014年度の学科授業「ロボット工学演習」で開発されたロボットを紹介する特設ページを作成しました.ぜひ,こちらをご参照ください.
本学では,創立者松前重義博士の偉業を顕彰し,その理念を継承することにより,本学園の人材育成と諸活動の向上発展に寄付する事を目的とした事業の一つとして,松前重義記念奨励賞制度があります.
本年度もその授与式が,2015年1月15日午後5時から,東京・霞が関ビル35階の東海大学校友会館で挙行されました.
この授与式において,本学科卒業生で現在も本学工学研究科情報理工学専攻の修士2年に在籍するヌルルイザティビンティアズリザンさんがこれまでの業績等を評価され,めでたく本奨励賞の一つである松前信子賞を受賞いたしました.
ヌルルイザティさんは,本学が参加していたマレーシア高等教育借款事業(通称:HELP3)のプログラムにより,2011年4月に本学3年次に編入して以降,学部および大学院において,様々な業績を残し,その結果として今回の受賞に至りました.



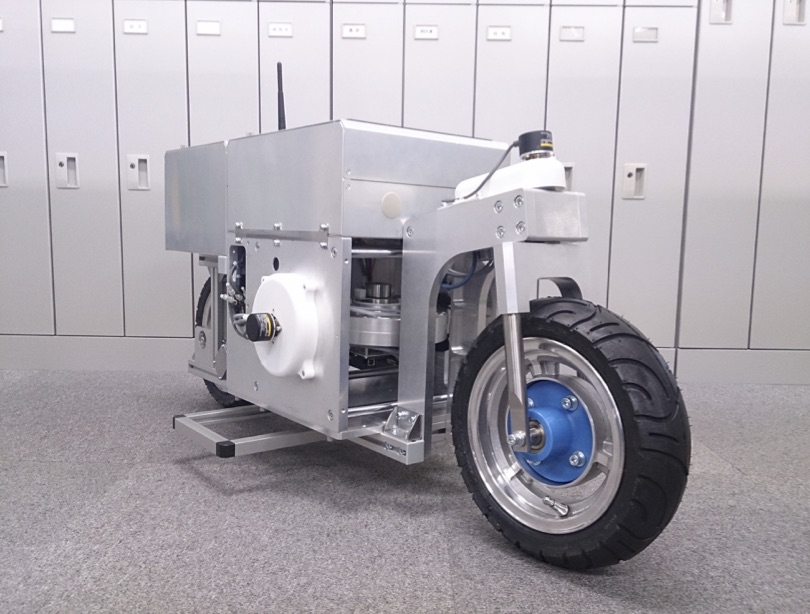
独楽の理論を用いた設計法により坂道も上がるジャイロバイクを実現しました.
自立走行する2輪車に関しては,慣性ロータ(フライホイール)を動かしバランスをとる方式であるムラタセイサク君が良く知られていますが,構造上駆動トルクを大きくできないため大型化は難しいと思われます.一方,ジャイロをアクチュエータとして使用する方式は,高速回転するフライホイールを傾転させることでトルクを得るものであり大きなトルクを得ることができ,大型化も可能です.
そこで大内研究室では,新たに開発した2段独楽理論を用いてジャイロ2輪車の数式モデルも作り,写真のジャイロバイクを作成,実験を行った結果,平坦な道だけでなく坂道や雑木林などでの自立走行においても理論通りの成果が得られることを確認しました.
この成果は,日刊工業新聞に紹介されました.以下はURLです.
http://www.robonable.jp/news/2014/12/tokai-1230.html
http://www.nikkan.co.jp/news/nkx0420141230eaai.html
4年生は,卒業研究の最後との追い込みを行っているのところだと思いますが,卒業研究概要について,フォーマットや締切 などが発表されました.詳しくは,こちらに詳細が示されておりますので,参照ください.
12月19日(金)17:00から,D棟2階コンピュータ応用工学科第1実験室にて,情報理工学部の留学生交流会を実施します.留学生との交流を図りたい邦人学生も大歓迎です.前回も,英語の不得意な邦人学生さんが多数参加
し会を楽しんでおりますので,英語ができなくても心配は要りませんので,積極的にご参加下さい!
12月5~10日にインドネシア・バリ島で実施された国際会議2014 IEEE International Conference on Robotics and Biomimetics(Robio2014 )にて,コンピュータ応用工学科稲垣研究室の修士2年Nurul Izzati Azlizanさんが研究成果の発表を行いました.
この国際会議はIEEEの主催によるロボットとバイオミメティックスに関すテーマを中心に扱う会議で,世界各国から638件の投稿があり,彼女の論文を含めた374件の論文が採択されました.
彼女の国際会議での発表はこれで3回目である事もあり,難なく発表を終え,聴講者から質問にも適切に回答していました.

