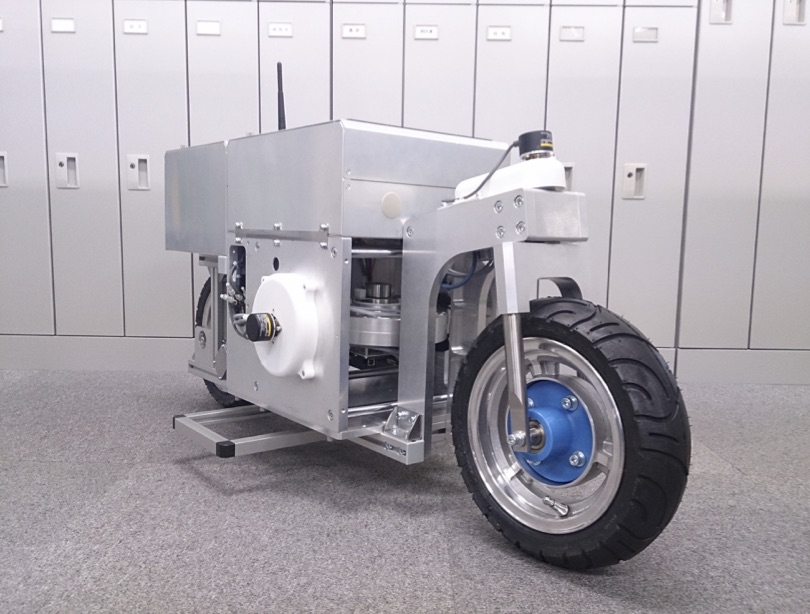
独楽の理論を用いた設計法により坂道も上がるジャイロバイクを実現しました.
自立走行する2輪車に関しては,慣性ロータ(フライホイール)を動かしバランスをとる方式であるムラタセイサク君が良く知られていますが,構造上駆動トルクを大きくできないため大型化は難しいと思われます.一方,ジャイロをアクチュエータとして使用する方式は,高速回転するフライホイールを傾転させることでトルクを得るものであり大きなトルクを得ることができ,大型化も可能です.
そこで大内研究室では,新たに開発した2段独楽理論を用いてジャイロ2輪車の数式モデルも作り,写真のジャイロバイクを作成,実験を行った結果,平坦な道だけでなく坂道や雑木林などでの自立走行においても理論通りの成果が得られることを確認しました.
この成果は,日刊工業新聞に紹介されました.以下はURLです.
http://www.robonable.jp/news/2014/12/tokai-1230.html
http://www.nikkan.co.jp/news/nkx0420141230eaai.html