スタッフ:
稲垣克彦 教授
ホームページ:
研究概要:
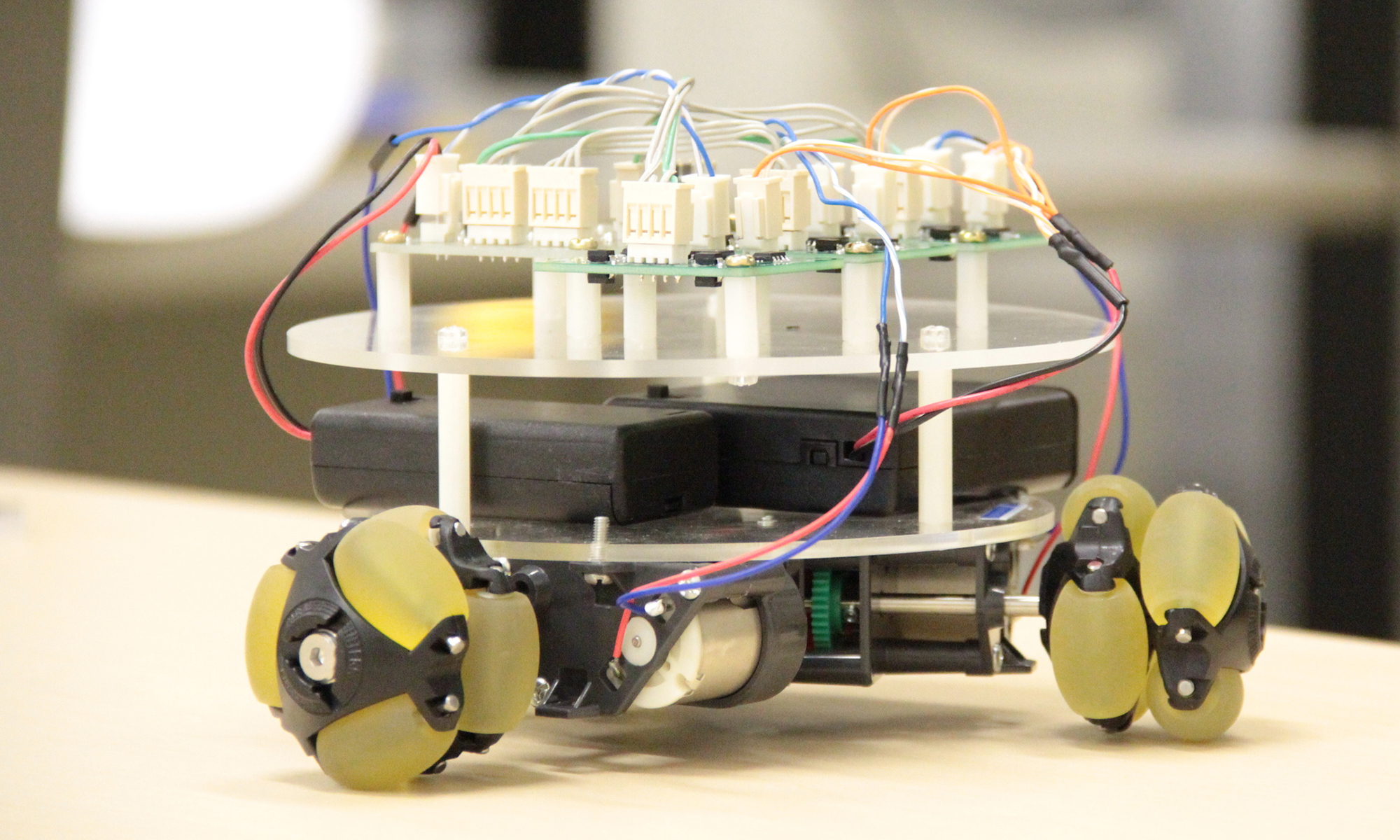
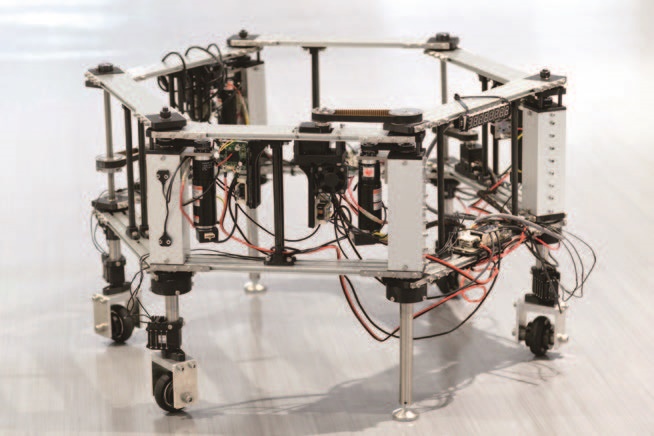
少子高齢社会に突入した日本において、ロボットやAIの活用が労働人口の不足を補う切り札となる可能性が大きいと言われています。コンピュータと同様に、ロボットはハードウェアとソフトウェアの両者があって、はじめて成立するものです。一方に問題があれば、良いロボットシステムを構築することはできません。当研究室では、移動ロボットを中心に、環境適応能力と移動効率の双方を満たす機構の設計とその制御システムの開発を行っています。また、近年ではICT技術の活用により、さまざまなアイデアを効率良く具現化できるような各種ツールが開発されています。これをサポートする教材開発等も研究対象の一つです。
研究テーマ:
- 移動ロボットの新機構・制御システムの開発
- メカトロ教育用教材の開発
連絡先:
湘南校舎19号館7F 内線6136
