専門分野や経歴はいろいろですが、親身な指導は共通です!!
教授 浅川 毅(あさかわ たけし)

| 学位 | 博士(工学) |
|---|---|
| 専門 | マイクロコンピュータ応用、VLSIテスト、コンピュータ情報処理 |
| 著書・論文 | 「PICアセンブラ入門」「基礎コンピュータ工学」 |
| 研究テーマ | 画像処理技術の応用、マイコンロボットの開発、自然向けコンピュータの開発 |
| 主な担当科目 | コンピュータ情報処理、システム開発演習、マイクロコンピュータ |
| 経歴 | 東京都立大学大学院工学研究科 |
| 研究室 | 第6研究室(研究室ページ) |
教授 稲垣克彦(いながき かつひこ)

| 学位 | 博士(工学) |
|---|---|
| 専門 | ロボット工学,制御工学 |
| 著書・論文 | 「自律分散システムに基づいた多脚歩行ロボットの設計とその運動制御」 |
| 研究テーマ | 多脚歩行ロボットの機構制御,歩容解析および分散制御 |
| 主な担当科目 | プログラミング・同演習,基礎電気回路・同演習,ロボット工学演習,アドバンストロボティクス |
| 経歴 | 法政大学大学院工学研究科 |
| 研究室 | 第12研究室(研究室ページ) |
教授 稲葉 毅(いなば たけし)
| 学位 | 博士(工学) |
|---|---|
| 専門 | 人間-機械システム,制御工学 |
| 著書・論文 | 「人間-機械制御系における操作者の動特性自己整形特性の解析と操作性を考慮した 制御系設計への応用」 |
| 研究テーマ | 人間-ロボット協調作業系の制御,人間-ロボット共創動作システム |
| 主な担当科目 | 電気磁気学,創造工学演習,機械運動学・同演習 基礎制御理論・同演習,人間機械制御システム |
| 経歴 | 東京工業大学大学院理工学研究科,東京工業大学 |
| 研究室 | 第2研究室(研究室ページ) |
教授 大内茂人(おおうち しげと)
| 学位 | 博士(工学) |
|---|---|
| 専門 | パワーエレクトロニクス,制御理論応用 |
| 著書・論文 | 「非線形制御理論に基づくクレーンの振れ止め制御」 |
| 研究テーマ | 電気自動車のトラクションコントロール,現代制御理論を用いた旋回・走行クレーンの制御 |
| 主な担当科目 | コンピュータ制御,システム制御理論,システム開発演習 |
| 経歴 | 千葉大学大学院自然科学研究科,電気機器メーカー |
| 研究室 | 第1研究室(研究室ページ) |
教授 曽根光男(そね みつお)

| 学位 | 工学博士 |
|---|---|
| 専門 | ディジタル画像処理,リモートセンシング |
| 著書・論文 | 「画像処理標準テキストブック」「エンサイクロペディア電子情報通信ハンドブック」 「新編 画像解析ハンドブック」 |
| 研究テーマ | 階層的画像処理アルゴリズムの開発 |
| 主な担当科目 | 画像処理,コンピュータグラフィックス |
| 経歴 | 大阪大学大学院,東京大学生産技術研究所,通信機器メーカー |
| 研究室 | 第7研究室(研究室ページ) |
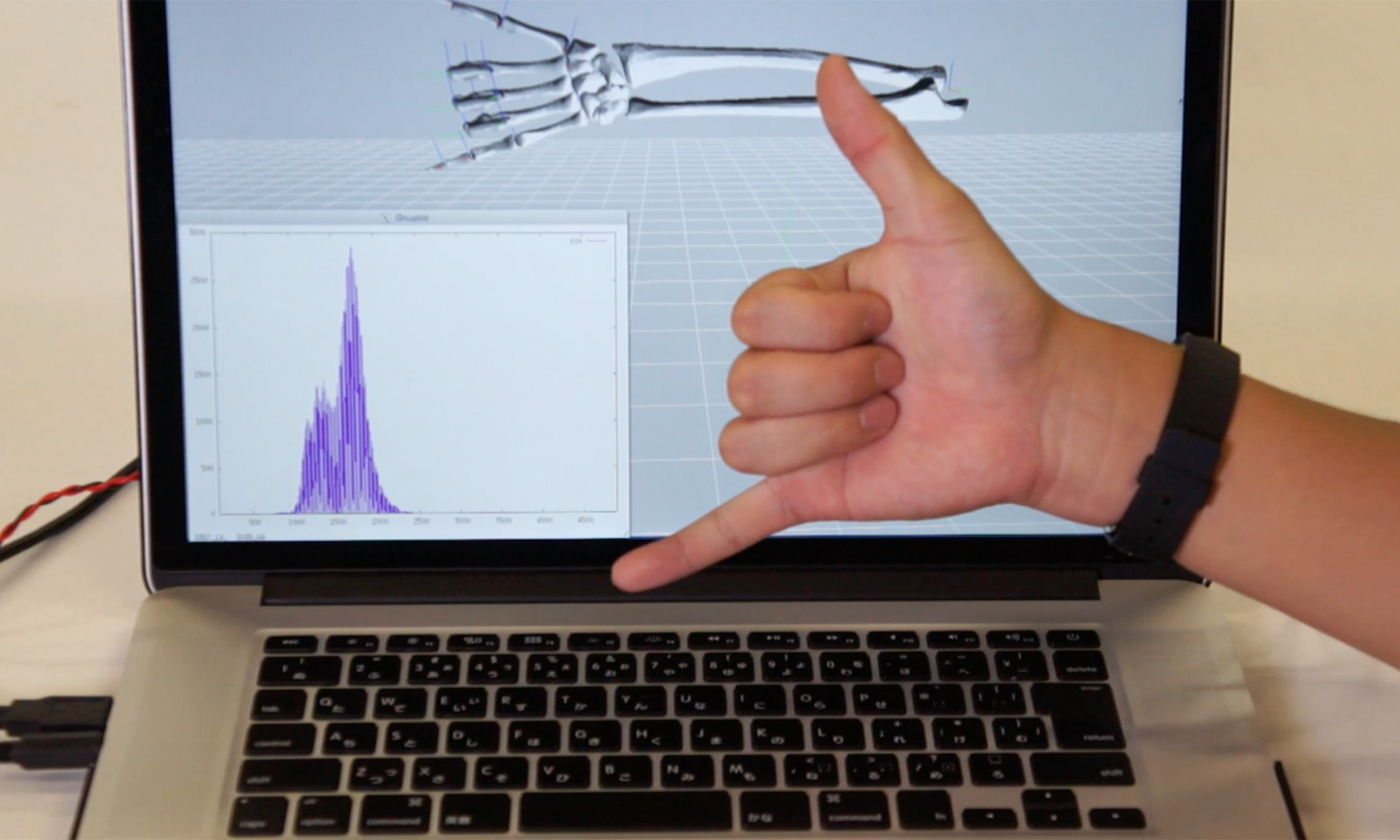
准教授 竹村憲太郎(たけむら けんたろう)
| 学位 | 博士(工学) |
|---|---|
| 専門 | 視線計測,移動ロボット,ヒューマンインタフェース |
| 著書・論文 | |
| 研究テーマ | 装着型人間行動計測システム,知能ロボットのための環境地図生成 |
| 主な担当科目 | 創造工学演習,コンピュータ演習,電子回路 |
| 経歴 | 奈良先端科学技術大学院大学 情報科学研究科 |
| 研究室 | 第5研究室(研究室ページ) |
教授 譚 学厚(たん がくこう)
| 学位 | 工学博士 |
|---|---|
| 専門 | アルゴリズムとデータ構造,計算幾何学 |
| 著書・論文 | 「計算幾何学入門」,「Finding an optimal bridge between two polygons」 |
| 研究テーマ | 最短路アルゴリズム,移動目標の探索アルゴリズム |
| 主な担当科目 | プログラミング・同演習,高機能プログラミング,基礎数学 |
| 経歴 | |
| 研究室 | 第11研究室(研究室ページ) |
教授 平田弘志(ひらた ひろし)

| 学位 | 博士(工学) |
|---|---|
| 専門 | 制御工学,適応制御 |
| 著書・論文 | 「マイコン計測制御活用法」「安定度指標を考慮したファジイ適応極配」 |
| 研究テーマ | 知的オートチューニングによる強安定適応制御システムの設計,ロボットの遠隔制御システム |
| 主な担当科目 | システムの数学・同演習,基礎制御理論・同演習,システム開発演習 |
| 経歴 | 東海大学大学院工学研究科 |
| 研究室 | 第8研究室(研究室ページ) |
講師 村松聡(むらまつ さとし)

| 学位 | 博士(工学) |
|---|---|
| 専門 | |
| 著書・論文 | |
| 研究テーマ | |
| 主な担当科目 | 基礎ロボット工学,センサ工学 |
| 経歴 | |
| 研究室 | 第3研究室 |
職員紹介
技術職員 吉岡邦彦
| 担当 | 創造工学演習、電気電子基礎実験担当、メカトロニクス実験 |
|---|
技術職員 西山 明芳

| 担当 | 応用実験、就職サポート |
|---|
事務職員 下田 良子
| 担当 | 学科事務全般担当 |
|---|